شرحی بر موتور های الکتریکی

موتورهای الکتریکی تنها یک بخش متحرک دارند، اما بررسی سه نوع مختلف آن و نحوه عملکرد هرکدام نشان میدهد که این دستگاهها چندان هم ساده نیستند.
علاقهمندان به خودرو سالها با مفاهیم موتورهای احتراق داخلی آشنا بودهاند، اما با روند رو به رشد برقیسازی خودروها، لازم است دانش خود را در این زمینه بهروز کنیم. بسیاری از ما با چرخهی چهارزمانه مکش، تراکم، احتراق و تخلیه که در بیشتر خودروهای امروزی استفاده میشود، آشنا هستیم. کسانی که به موتورهای برفروب یا قایقهای موتوری علاقه دارند، احتمالاً طرز کار موتورهای دوزمانه را هم میدانند. حتی برخی از افراد فنی ممکن است از مکانیزم پیچیدهی موتور وانکل و نحوهی عملکرد آن اطلاعات داشته باشند. اما برای بیشتر علاقهمندان به خودرو، آشنایی با موتورهای الکتریکی شاید تنها به آخرین باری که استارت ماشینشان از کار افتاد، محدود شود!
همهی انواع موتورهای خودروهای برقی دارای دو بخش اصلی هستند. استاتور، که پوستهی ثابت و بیرونی موتور است و مانند بلوک موتور در خودروهای احتراقی، به شاسی متصل میشود. روتور، تنها بخش متحرک موتور است و نقشی مشابه میللنگ در موتورهای احتراقی دارد؛ به این صورت که گشتاور تولیدی را از طریق جعبهدنده به دیفرانسیل منتقل میکند.
بیشتر خودروهای برقی از یک سیستم انتقال قدرت مستقیم (تکسرعته) برای کاهش سرعت چرخش بین موتور و چرخها استفاده میکنند. درست مانند موتورهای احتراق داخلی، موتورهای الکتریکی نیز در دورهای پایین (RPM کم) و تحت بار بیشتر، بالاترین بازدهی را دارند.
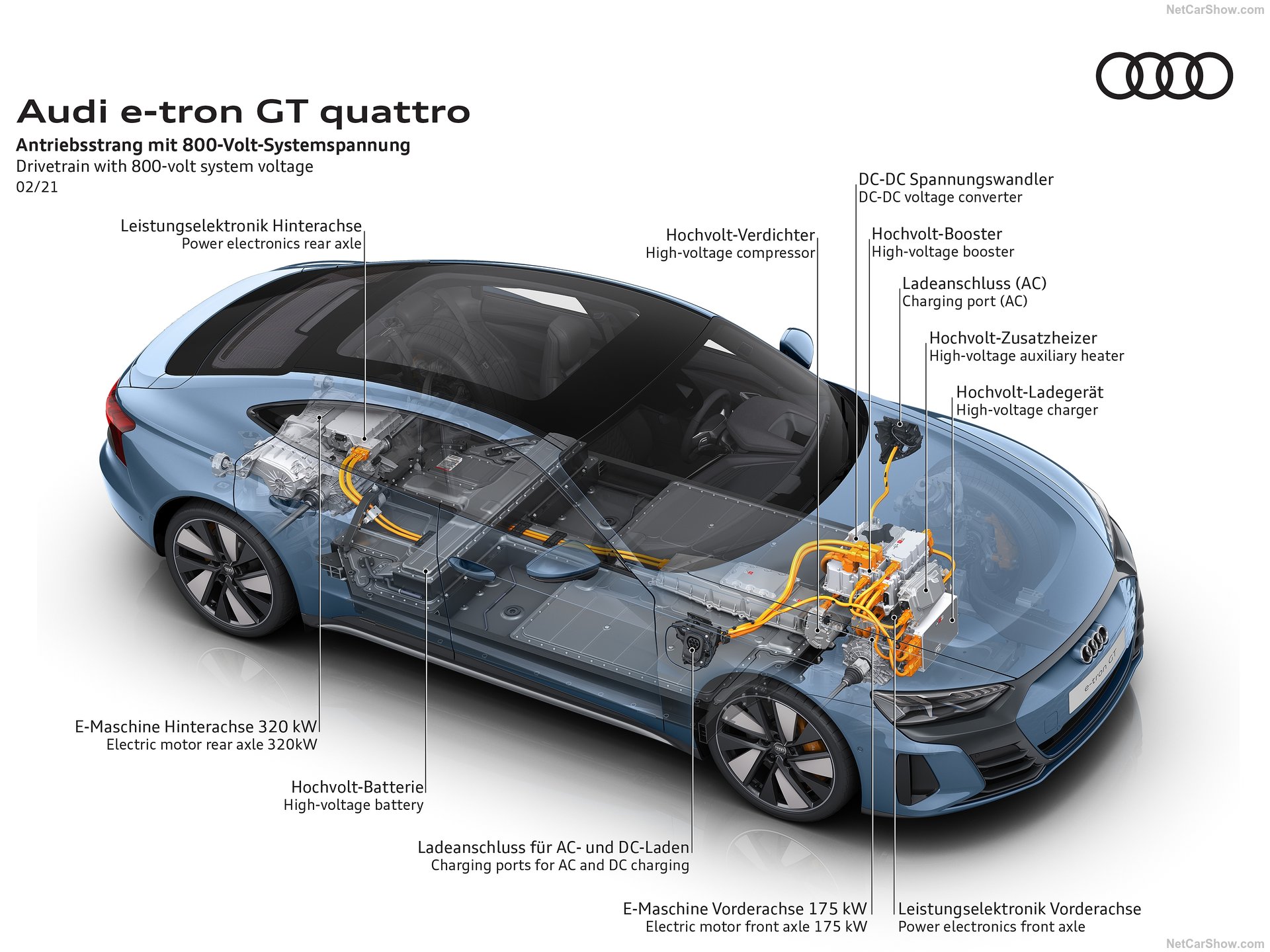
اگرچه یک خودروی برقی با یک دنده میتواند برد حرکتی قابل قبولی ارائه دهد، اما وانتها و شاسیبلندهای سنگین که برای کشیدن تریلر طراحی شدهاند، در سرعتهای بالا (مثلاً در اتوبان) با استفاده از یک جعبهدنده چند سرعته میتوانند برد بیشتری داشته باشند. در حال حاضر، تنها آئودی e-tron GT و پورشه تایکان از گیربکس دو سرعته استفاده میکنند.
به دلیل اتلاف انرژی در دندههای متعدد و هزینههای بالای توسعه، خودروهای برقی معمولاً با گیربکسهای چندسرعته عرضه نمیشوند، اما پیشبینی میکنیم که این روند در آینده تغییر کند.
ویژگیهای مشترک موتورهای برقی
تمامی سه نوع اصلی موتورهای برقی از جریان متناوب سه فاز برای ایجاد یک میدان مغناطیسی چرخشی (RMF) استفاده میکنند. فرکانس و توان این میدان توسط الکترونیک قدرت تنظیم میشود که با فشردن پدال گاز تغییر میکند.
استاتورها شامل شکافهای موازی زیادی هستند که با حلقههای مسی به هم متصل پر شدهاند. این حلقهها میتوانند به شکل سیمپیچهای مسی ضخیم و گرد یا سیمپیچهای مسی سوزنی شکل با مقطع مربعی باشند که هم تراکم سیمپیچی را افزایش میدهند و هم تماس مستقیم سیمها با یکدیگر در شیارها را بهبود میبخشند.
سیمپیچهای فشردهتر باعث افزایش توانایی تولید گشتاور میشوند، و طراحی مرتبتر در انتهای سیمپیچها باعث کاهش حجم و کوچکتر شدن ابعاد کلی موتور خواهد شد.

باتریها دستگاههای جریان مستقیم (DC) هستند، بنابراین در الکترونیک قدرت خودروهای برقی یک اینورتر DC-AC وجود دارد که جریان AC لازم برای ایجاد میدان مغناطیسی دوار متغیر (RMF) را به استاتور میدهد. اما نکته جالب این است که این موتورهای الکتریکی همچنین ژنراتور هستند. یعنی چرخها میتوانند روتور را داخل استاتور بچرخانند و یک میدان مغناطیسی دوار معکوس ایجاد کنند که برق را از طریق اینورتر AC-DC به باتری باز میفرستد. این فرآیند که به نام ترمز احیا کننده (Regenerative Braking) شناخته میشود، باعث ایجاد مقاومت و کاهش سرعت خودرو میگردد.
ترمز احیا کننده نه تنها برای افزایش برد خودروهای برقی ضروری است، بلکه در هیبریدهای کارآمد نیز بسیار مهم است، زیرا هرچه توان احیا بیشتر باشد، عدد بازدهی سوخت در معیارهای EPA بهتر خواهد بود. با این حال، در دنیای واقعی، ترمز احیا کننده به اندازه حرکت آزاد (coasting) کارآمد نیست، چون هر بار که انرژی از موتور و مبدل عبور میکند، اتلاف انرژی رخ میدهد.

سه نوع موتور برقی خودرو
انواع موتورهای برقی بر اساس تفاوتهای اساسی در روتور طبقهبندی میشوند که روشهای کاملاً متفاوتی برای تبدیل میدان مغناطیسی دوار استاتور (RMF) به حرکت چرخشی واقعی هستند. این تفاوتها به اندازهای چشمگیرند که میتوانند آنالوژی که برای موتورهای چهارزمانه، دوزمانه و وانکل داشتیم، بهخوبی توجیه کنند. در دسته ناهمزمان، موتورهای القایی قرار دارند، در حالی که در دسته همزمان، موتورهای مغناطیس دائم و موتورهای تحریکشده با جریان قرار میگیرند.
همانطور که از نامش پیداست، روتورهای موتورهای مغناطیس دائم خود دارای مغناطیس طبیعی هستند. برای ایجاد میدان مغناطیسی روتور نیازی به تأمین انرژی نیست، بنابراین این موتورها در سرعتهای پایین بسیار بازدهی بالاتری دارند. این روتورها همچنین به طور هماهنگ با میدان مغناطیسی دوار استاتور (RMF) میچرخند، به همین دلیل این موتورها همزمان هستند.
اما استفاده از مغناطیسهای سطحی روی روتور مشکلاتی دارد. اولاً، این کار نیاز به مغناطیسهای بزرگتر دارد و به همین دلیل نگه داشتن روتور در سرعتهای بالا مشکلتر میشود، زیرا با سنگینتر شدن، کنترل آن دشوارتر میشود. مشکل اصلیتر اما مربوط به پدیدهای به نام “EMF معکوس” است که در سرعتهای بالا رخ میدهد؛ یعنی میدان مغناطیسی معکوس القا شده باعث ایجاد مقاومت اضافی میشود که قدرت نهایی موتور را محدود کرده و گرمای زیادی تولید میکند که میتواند به مغناطیسها آسیب وارد کند.
برای مقابله با این مشکل، بیشتر موتورهای مغناطیس دائم در خودروهای برقی از مغناطیسهای دائم داخلی (IPM) استفاده میکنند که به صورت جفتی در شکافهای V شکل طولی قرار میگیرند و در چندین لوب زیر سطح هسته آهنی روتور جاگذاری میشوند. این شکافها در سرعتهای بالا مغناطیسها را محکم نگه میدارند، اما مناطقی که بین مغناطیسها به طور خاص طراحی شدهاند، باعث ایجاد گشتاور القایی میشوند. مغناطیسها یا به یکدیگر جذب میشوند یا از هم دفع میشوند، اما در حالت معمولی، (الاستیسیته) نیرویی که یک مغناطیس را به جعبه ابزار میچسباند باعث جذب لوبهای هسته آهنی روتور به میدان مغناطیسی دوار (RMF) میشود.
مغناطیسهای دائم داخلی در سرعتهای پایین کار را انجام میدهند و در سرعتهای بالا گشتاور الاستیسیته جایگزین میشود. اگر فکر میکنید این تکنولوژی جدید است، باید بدانید که تویوتا پریوس نیز از این سیستم استفاده میکند.

آخرین مدل موتور تا مدتها در خودروهای برقی وجود نداشت، زیرا باور عمومی بر این بود که موتورهای بی جاروبک (brushless)، که همین موتورها را شامل میشود، تنها گزینهی قابل استفاده برای خودروهای برقی هستند. اما اخیراً BMW این روند را شکست و موتورهای AC همزمان تحریک شده با جریان و جاروبک دار را در مدلهای جدید i4 و iX نصب کرد. در این نوع موتور، روتور دقیقاً همانند روتورهای مغناطیس دائم با میدان مغناطیسی دوار استاتور (RMF) تعامل دارد، با این تفاوت که روتور در این موتورها مغناطیسهای دائم ندارد. در عوض این موتور به جای استفاده از مغناطیسهای دائم، شش لوب مسی گسترده دارد که با انرژی DC باتری شارژ میشوند تا EMF مورد نیاز را تولید کنند. برای انجام این کار، از حلقههای لغزشی و برسهای فنری روی شافت روتور استفاده میشود. این طراحی باعث شده که برخی از سازندگان از این روش اجتناب کنند، چرا که نگرانیهایی در مورد سایش برسها و غبار حاصل از آن وجود دارد. آیا سایش برسها مشکلی ایجاد خواهد کرد؟ هنوز مشخص نیست، اما احتمالاً اینطور نخواهد بود. زیرا مجموعه برسها در یک محفظه ایزوله قرار دارد و یک پوشش قابل جدا شدن دسترسی آسان به آن را فراهم میکند.
نبود مغناطیسهای دائم مشکلات مربوط به افزایش هزینههای مغناطیسهای نادر و تأثیرات زیستمحیطی معدنکاری را حل میکند. این سیستم همچنین این امکان را میدهد که قدرت میدان مغناطیسی روتور قابل تغییر باشد، که باعث بهینهسازی بیشتر میشود. با این حال، هنوز برای تحریک روتور به انرژی نیاز است، که باعث میشود این موتورها در مقایسه با سایر موتورها کارآمدی کمتری داشته باشند، مخصوصاً در سرعتهای پایین که انرژی مورد نیاز برای ایجاد میدان مغناطیسی، بخش بزرگی از مصرف کل انرژی را تشکیل میدهد.
ظاهر موتورهای AC همزمان تحریکشده با جریان به قدری جدید است که در تاریخ کوتاه خودروهای برقی، نشان دهنده این است که ما هنوز در مراحل ابتدایی مسیر توسعه این تکنولوژی قرار داریم. فضای زیادی برای ایدههای نو وجود دارد و تاکنون تغییرات مهمی در این زمینه رخ داده است، از جمله تصمیم تسلا برای کنار گذاشتن مفهوم موتور القایی که مبنای نام برند و لوگوی خودش بود و حرکت به سمت موتورهای مغناطیس دائم همزمان. و هنوز کمتر از یک دهه از آغاز دوران مدرن خودروهای برقی میگذرد—ما تازه در آغاز این مسیر هستیم.
